|
|
|
|
|
|
Prosegue a livello personale il rapporto di collaborazione con la società angloamericana STRobotics, (produttrice di piccoli robot industriali) in qualità di consulente/agente. Il mio ruolo professionale inizia dall'analisi del problema del cliente; prosegue identificando (qualora possibile) il robot adatto alle esigenze e fornendo l'assistenza allo sviluppo del software (che può essere realizzato anche direttamente dal cliente o dalla STRobotics) per poi terminare con l'assistenza alla fornitura. E' importante sottolineare che la STRobotics è in grado anche di fornire robot parzialmente assemblati su misura del cliente utilizzando i vari moduli disponibili.
R12 –
Antropomorfo
Test di durata per lettori di carte prepagate.
Sistema realizzato per la British Telecom nei primi anni 90. Le
carte vengono prelevate da un dispenser appositamente realizzato
e inserite nel lettore motorizzato. Il risultato della lettura
viene riportato al controller del robot.
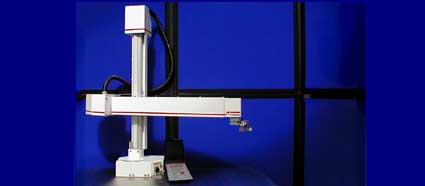
R15 –
Cartesiano (questo robot è disponibile
in varie configurazioni)
Servizio in camera pulita.
Il robot alimenta una macchina essiccatrice per wafer di silicio.
Il robot in questo caso è stato munito di appositi filtri
e protezioni per renderlo rispondente allo standard di classe
10 per le “camere pulite”
Magazzino multimediale (juke box)
Il sistema mostrato dimostra ampiamente la flessibilità
del disegno modulare di questi robot. Realizzando bracci appositi
e utilizzando i gruppi motori standard si è realizzato
un sistema di dimensioni notevoli che corre tra due binari posti
sul pavimento e sul soffitto di un locale che gestisce un magazzino
automatico di video cassette e video dischi. I media prelevati
vengono inseriti in due lettori dopo aver verificato il codice
a barre riportato sul contenitore.
Sistema di incollaggio.
In modalità di movimento continuo il sistema applica colla
a caldo su tappetini per automobili in modo flessibile e riconfigurabile.
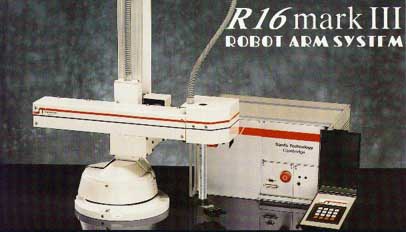
R16 – Cilindrico
Sistema di collaudo.
Il primo esempio mostra un sistema automatico di collaudo per
iniettori per motori diesel. Per aumentare il ritmo di produzione
il robot è stato dotato di una doppia pinza pneumatica.Gli
iniettori vengono prelevati da una rastrelliera (il controller
dispone di speciali istruzioni per facilitarene la gestione) e
inseriti in uno strumento a depressione.
Sistema di movimentazione
Il sistema movimenta tra diverse macchine anelli per pistoni presso
uno stabilimento della Mercedes integrando un robot standard con
una guida lineare.
Analisi automatiche
In questo video viene presentato un completo sistema per la realizzazione
di cicli di analisi strumentali in modo completamento automatico
presso una industria farmaceutica. Il robot è posto anche
in questo caso su una guida lineare (comandata dallo stesso controller)
che ne estende il raggio di azione, e trasporta le piastre tra
una macchina e l'altra.
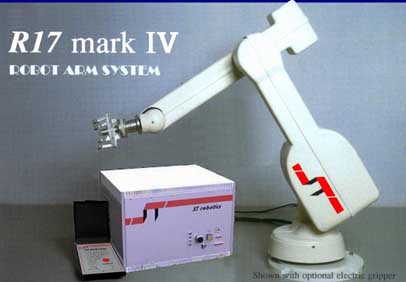
R17 –
antropomorfo
Rifinitura.
Il robot, utilizzando un attrezzo pneumatico, rifinisce le bave
di tettucci apribili (per autovetture) prodotti da stampo.
Test di vita
La flessibilità tipica dei robot e la semplicità
di programmazione ne rendono conveniente l'utilizzo anche in applicazioni
apparentemente banali. In questo caso una industria di apparecchi
televisivi lo utilizza per i testi di durata di interruttori e
altri dispositivi.
Verniciatura
Il robot si presta molto bene alla verniciatura di piccoli pezzi
anche piuttosto articolati in modo completamente automatico.
R27/3 (versione
customizzata del modello R17 MKIII)
Spruzzatura
Esempio di applicazione per la spruzzatura di distaccante in stampi
di braccioli per poltroncine da ufficio. Con l'opzione (ora standard)
per il movimento continuo il robot si presta bene anche alla spruzzatura
precisa di incollanti e distaccanti per limitare l'esposizione
del personale a sostanze comunque nocive.
 |
NASA have been using the R16 in pilot studies
for the new Constellation X astronomy satellite project. It has
been used for trial installation of mirrors in a sub-project
called PARAT - Precision Alignment Robotic Assembly Tool. The
R16 is now obsolete and NASA are planning to continue the project
with an R19D |
|
Pallettizzatori: (R25) |
 |
|
||
|
Sistema di carico/scarico pezzi con identificazione visiva automatica. Esempio di integrazione da tecnologie diverse ad un comando di uno spettatore il trenino viene indirizzato in un binario morto e fermato in una posizione non rigidamente determinata. La telecamera, collegata ad un digitalizzatore video, ricostruisce la presenza e la posizione dei piccoli carichi trasportati. Il computer ne calcola poi la posizione nello spazio e la invia al robot che preleva i pezzi e li deposita in una zona apposita di stoccaggio dalla quale potranno poi essere prelevati invertendo il procedimento. (BIMU 1994, Fortronic 1994) |
|
|
 |
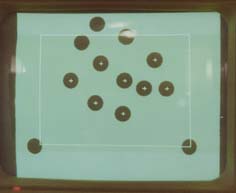
Sistema di riconoscimento e pallettizzazione. Alcuni pezzi (monete) vengono rovesciati in modo casuale su un piano luminoso. Una telecamera inquadra l'immagine, identifica i pezzi che si trovano distinti tra di loro, ne calcola la posizione nello spazio e la passa al robot. Questo preleva i pezzi uno alla volta e li deposita su un piatto circolare con un foro centrale allineati per file parallele. (Parma 1995) |
|
 |
|
 |
I robot cartesiani della ST Robotics sono caratterizzati da una composizione modulare, realizzata su misura del cliente componendo i vari tipi di moduli motorizzati lineari e rotativi, mantenendo sempre lo stesso controller di tutti gli altri modelli (K11R). Le caratteristiche che seguono sono puramente indicative proprio per la natura configurabile di questo tipo di prodotto.
Moduli lineari leggeri per sistemi piccoli, utilizzano cinte di trasmissione in poliuretano armato in acciaio e guide "heavy duty" (per il tipo E) o doppie miniatura (per il tipo D)
|
|
|
| Corsa massima: | 750mm |
| Velocità massima: | 500mm/sec |
| Carico utile come asse Z: | 2Kg |
| Ripetibilità: | 0.025mm |
|
|
|
| Corsa massima: | 1500mm |
| Velocità massima: | 500mm/sec |
| Carico utile come asse Z: | 2Kg |
| Ripetibilità: | 0.1mm |
Moduli lineari di classe medio/pesante per gli assi X e Y di sistemi vari, utilizzano cinte di trasmissione in poliuretano armato in acciaio e guide "heavy duty"
|
|
|
| Corsa massima: | 3000mm |
| Velocità massima: | 2000mm/sec |
| Carico utile come asse Z: | 15 Kg |
| Ripetibilità: | 0.1mm |
Moduli lineari di classe pesante per gli assi X di sistemi vari, utilizzano cinte di trasmissione in poliuretano armato in acciaio e guide "heavy duty" con carrelli a doppio gruppo di cuscinetti a ricircolo di sfere
|
|
|
| Corsa massima: | 10000mm |
| Velocità massima: | 2000mm/sec |
| Carico utile come asse orizzontale: | 100 Kg |
| Ripetibilità: | 0.1mm |
|
|
||||
|
|
|
|
|
|
| PR | combinato pitch/roll | 5 N/m | 45 deg/sec | 0.2 deg |
| P4 | leggero di sola rotazione, preciso | 10 N/m | 90 deg/sec | 0.05 deg |
| P7 | alto carico utile, rotazione | 25 N/m | 360 deg/sec | 0.1 deg |
|
|
|
| Formato | Cilindrico |
| Numero di assi | da 3 a 5 |
| Motorizzazione | mediante motori passo-passo |
| Feedback | mediante encoder ottici incrementali |
| Trasmissione | mediante cinte gommate e dentate armate in acciaio |
| Apprendimento | mediante semplice tastiera custom |
| Opzioni elettroniche | Turbo system, movimento continuo, drive silenziosi |
| Interfacce | memoria non volatile, schede addizionali di I/O |
| Opzioni meccaniche | Guida lineare di trasporto, soffietti antipolvere |
|
|
|
| Raggio utile | 500 mm |
| Carico utile | 4 Kg |
| Velocità | max 750 mm/sec |
| Ripetibilità | +/- 0.1 mm |
| Accelerazione | 2 G |
| Peso | 20 Kg |
| Alimentazione | 110/240Vca 350 VA |
| MTBF | 10.000 ore |
|
|
|
| Formato | Antropomorfo |
| Numero di assi | 5 |
| Motorizzazione | mediante motori passo-passo |
| Feedback | mediante encoder ottici incrementali |
| Trasmissione | mediante cinte gommate e dentate armate in acciaio |
| Apprendimento | mediante semplice tastiera custom |
| Opzioni elettroniche | Turbo system, movimento continuo, drive silenziosi |
| Interfacce | memoria non volatile, schede addizionali di I/O |
| Opzioni meccaniche | Guida lineare di trasporto, soffietti antipolvere |
|
|
|
| Raggio utile | 750 mm |
| Carico utile | 4 Kg alla flangia (con degradazione di precisione, accelerazione e velocità). Coppia al polso max 8N/m |
| Velocità | Spalla H: 120 gr/sec; Spalla V: 100 gr/sec; Gomito: 180 gr/sec; Polso: 750 mm/sec |
| Ripetibilità | +/- 0.2 mm |
| Accelerazione | 2 G |
| Peso | 22 Kg |
| Alimentazione | 110/240Vca 420 VA |
| MTBF | 10.000 ore |
|
|
|
| Formato | Cilindrico |
| Numero di assi | Mod A: da 2 a 3; Mod B: da 4 a 5 |
| Motorizzazione | mediante motori passo-passo |
| Feedback | mediante encoder ottici incrementali |
| Trasmissione | mediante cinte gommate e dentate armate in acciaio |
| Apprendimento | mediante semplice tastiera custom |
| Opzioni elettroniche | Turbo system, movimento continuo, drive silenziosi |
| Interfacce | memoria non volatile, schede addizionali di I/O |
| Opzioni meccaniche | Guida lineare di trasporto, soffietti antipolvere |
|
|
|
| Raggio utile | 550 mm |
| Carico utile | R19a: 0.5 Kg; R19b: 2Kg |
| Velocità | max 750 mm/sec |
| Ripetibilità | +/- 0.1 mm |
| Accelerazione | 2 G |
| Peso | 20 Kg |
| Alimentazione | 110/240Vca 350 VA |
| MTBF | 10.000 ore |
Nota: le caratteristiche dei robot possono variare senza preavviso. Per i dati aggiornati si consiglia di visitare il sito del produttore STRobotics