|
|
|
|
|
|
Is still aliving my job cooperation with angloamerican company STRobotics, (producer of small industrial robots) asa freelance agent/consultant. My professional job start with the analisys of customer needs; continue with the identification (if possible) of the robot that best fit the needs and delivering the assistance to the development of the software (that can even be written by STRobotics or by customer itself) and end with the assistance to the devilervy and installation. It's really important to underline that STRobotics can even delivery partially assembled robots to fit special customer needs using standard modules (such a case the customer is the only responsible for the respect of standard international rules and directives).
Please refer to customer web site at: STRobotics.com
 |
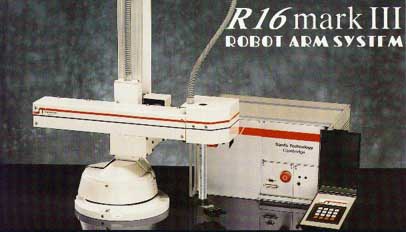
NASA have been using the R16 in pilot studies
for the new Constellation X astronomy satellite project. It has
been used for trial installation of mirrors in a sub-project
called PARAT - Precision Alignment Robotic Assembly Tool. The
R16 is now obsolete and NASA are planning to continue the project
with an R19D |
|
Palletizer: (R25) |
 |
|
||
|
Piece loading/unloading with automatic image processing and identification. An example of technology integration. On a visitor command the small train is addressed to a special rail and stopped in a special but not fixed position. A video camera, through a digitizer and a computer, detect the presence and position of small loads carried by the freight cars. The computer then compute the spatial 3D position and send it to the robot that run, get the pieces and put them in a special stock area from which it could be later upload reversing the job. (BIMU 1994, Fortronic 1994) |
|
|
 |
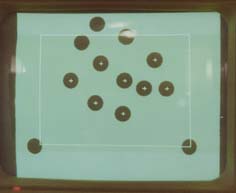
Detecting palletizing system. Some pieces (coins) are casually loaded on a lighting plate. A video camera"see" the image, detect each "alone" coin, compute spatial 3D position and send it to the robot. This get the piece one at a time and put them on a circular plate (with central hole) aligned along parallel lines. (Parma 1995) |
|
 |
Programmable pallettizer Unloading of small made by pressed thungsten powder. Pieces are got from the producing machine using many kind of tools and direction and put along parallel lines on a grafite plate. The system, computer controlled, is fully programmable digiting only dimensions of pieces and type of tool. |
 |